
中国宁波网记者 成良田 实习记者 尹幸芷 通讯员 高晓静
茹浩磊最近有点小忙,邀约不断:上周刚从郑州出差回来,下周又要去趟上海,接下来还要去连云港……
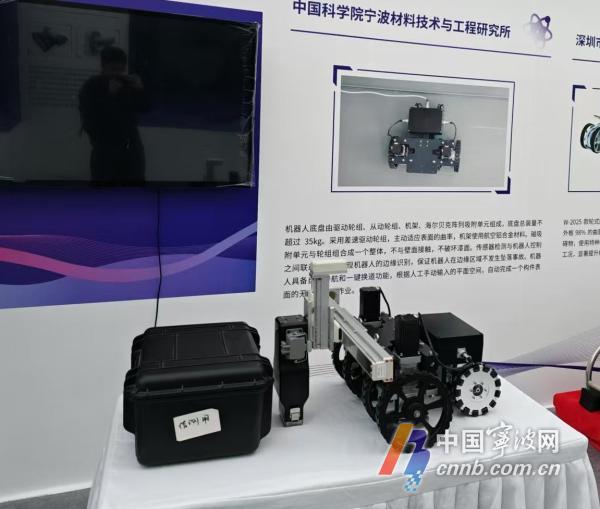
茹浩磊是中国科学院宁波材料技术与工程研究所(以下简称宁波材料所)机器人视觉技术团队高级工程师、高空作业机器人项目负责人。春节将至,茹浩磊和团队却行程满满,马不停蹄。
“这些天,来对接洽谈的很多,都拜这些‘蜘蛛侠’所赐。”在宁波材料所一间实验室里,茹浩磊指着攀附在曲面垂直钢板上的爬壁机器人说。

机器人装着几个轮子或是两条履带,上面搭配一个平台,外加一些传感器,吸附在垂直的钢板上。乍一看,其貌不扬。记者心里正犯嘀咕,其中一款机器人突然动起来,在垂直的钢板上,以不紧不慢的速度随意游走起来。
“不同复杂钢结构应用场景,都能顺利攀爬上去。”一旁操作的工程师苏阔说,前些天,他们就是带着这款爬壁机器人去了郑州高铁站,对高铁风雨棚钢结构立柱进行了测试工作。
“为什么它不会掉下来?”
“在钢结构立面作业时,爬壁机器人会不会意外坠落,以及作业是否安全可靠,是研发时必须优先考虑的问题。目前,金属立面作业基本采用磁吸附方式,在断电等极端情况下,采用永磁吸附技术能保证机器人不会坠落。”苏阔解释。
不只是爬壁,这款机器人最终还能实现负重爬行、障碍物识别与避障、功能检测、高精度定位等功能。
“我们开发的检测机器人,搭载高清摄像头传感器以及我们自主研发的缺陷识别软件。”研究员肖江剑说,“当捕捉到高空钢结构表面微小的漆面裂痕、锈蚀等缺陷时,就会通过激光定位系统进行标记和数据回传,便于后续的维修作业。”
国内高铁风雨棚立柱的直径一般一米左右,多为金属材质,受风吹日晒以及雨水腐蚀,一旦外部涂层有损坏,就会存在不同程度的安全隐患。
以前,这种立柱维护主要靠人工操作,需要先搭脚手架,再由工人攀高作业。不仅存在安全风险,还有耗时长、占用轨道等痛点。
“使用这款三轮曲面自适应清洗机器人,装备多模态感知系统、激光除锈设备,可应对不规则复杂曲面、空间折角等表面除锈去漆作业,脏活累活轻松搞定。”茹浩磊自信满满。
除了曲面自适应清洗机器人,垂直曲面钢板上,还挂着磁力爬壁检测机器人、曲面自适应柔性履带爬壁机器人等。“这些都是已经研发定型的,每一款都有自己的应用场景。”茹浩磊说。
比如,跨海大桥、船舶外板、大型储罐、风电塔筒等各种不同尺寸、不同结构的装置检测维修。
为什么研发这些机器人?

“研发能爬壁的高空作业机器人,起初源于宁波本地一家企业对船舶开展检测除锈的需求。后来发现,它应用场景太大了。”茹浩磊说。
全国钢结构桥梁、风电塔、化工储罐、船舶、核电等大型金属立面,量大面广。这些设施的高空作业场景,对可靠性、安全性和作业效率的要求逐年升高,传统人工作业模式已无法满足钢结构作业要求,还大大限制了高空作业的高效性和精准性。
需求和痛点,就是创新着力点。

两年多时间里,研发团队在资源有限、经费短缺、人才不足等困难和挑战下,围绕钢结构下高空作业机器人的负载力、自主导航、高效避障等持续攻坚,取得了多项成果,研发出最大负载50公斤高空作业机器人,可实现最小800毫米直径的立柱爬行。
“这段时间,不少企业和单位来联系,给了我们不少信心。接下来,我们还将前往连云港,挑战复杂的核电站核岛穹顶内壁污渍清理作业。”茹浩磊表示,这些测试场景,有利于机器人持续升级。未来,研发上要实现更加智能化、轻量化、紧凑化、低成本化,使用户有更好的体验。
正聊着,实验室内又传来了机器人的声响,它又上墙了,正飞檐走壁。